80386 Memory Pipeline
The FPGA 386 core I've been building now boots DOS, runs applications like Norton Commander, and plays games like Doom. On DE10-Nano it currently runs at 75 MHz. With the core now far enough along to run real software, this seems like a good point to step back and look at one of the 80386's performance-critical subsystems: its memory pipeline.
32-bit Protected Mode was the defining feature of the 80386. In the previous post, I looked at one side of that story: the virtual-memory protection mechanisms. We saw how the 80386 implements protection with a dedicated PLA, segment caches, and a hardware page walker. This time I want to look at virtual memory from a different angle: the microarchitecture of the memory access pipeline, how address translation is made efficient, how microcode drives the process, and what kind of RTL timing the design achieves.
On paper, x86 virtual memory management looks expensive. Every memory reference seems to require effective address calculation, segment relocation, limit checking, TLB lookup, and, on a miss, two page-table reads plus Accessed/Dirty-bit updates. Yet Intel's own 1986 IEEE ICCD paper, Jim Slager's Performance Optimizations of the 80386, describes the common-case address path as completing in about 1.5 clocks. How did the 386 pull that off?
The answer is that virtual memory is not really a serial chain of checks, even if the diagrams make it look that way. It is a carefully overlapped memory pipeline that uses pre-calculation, pipelining, and parallelism to keep the common case surprisingly short.
Microcode for memory accesses
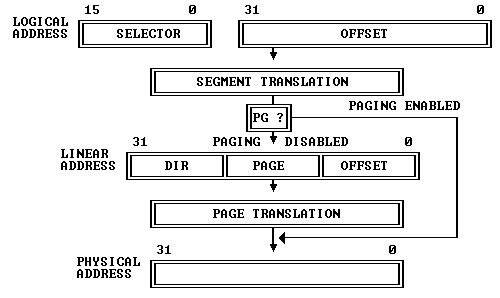
Intel's 80386 Programmer's Reference Manual describes 80386 address translation like this:
"The 80386 transforms logical addresses (i.e., addresses as viewed by programmers) into physical address (i.e., actual addresses in physical memory) in two steps: segment translation... and page translation..."
The manual illustrates it as follows:
Before looking at the hardware, it helps to start from the microcode. Here is the microcode for an ALU instruction that reads memory, modifies it, and writes it back, for example ADD [BX+4], 8:
; ADD/OR/ADC/SBB/AND/SUB/XOR m,i
039 EFLAGS -> FLAGSB FLGSBA RD 9
03A DLY
03B OPR_R -> TMPB WRITE_RESULT JMP UNL
03C TMPB IMM +-&|^
; WRITE_RESULT
046 SIGMA -> OPR_W RNI WR 0
047 DLY
If this is the first post in the series you are reading, here is the minimum amount of syntax you need:
- the hexadecimal number at the start (
039,03A, ...) is the microcode address SRC -> DSTmeans moving a value between internal registers or busesRDandWRstart memory reads and writesDLYmeans "wait here until the memory side catches up"SIGMAis the ALU result registerOPR_RandOPR_Ware the read-data and write-data registers for memory operandsRNImeans "run next instruction", i.e. this micro-routine is ending
Three things matter here:
RDstarts a memory readWRstarts a memory writeDLYis where the microcode waits for the result to become available
Note that patterns like RD + DLY and WR + DLY occur all over the microcode. If address generation, translation, and bus arbitration were slow, the entire machine would bog down. So the interesting question is:
How does the hardware make these tiny
RDandWRhooks cheap enough that the whole machine still works?
Intel's answer was to build a dedicated address path that usually adds only about one extra cycle, or in their own phrasing, about 1.5 clocks for the address pipeline itself.
Efficient segmentation
Here is the familiar way in which segmentation transforms a logical address into a linear address:
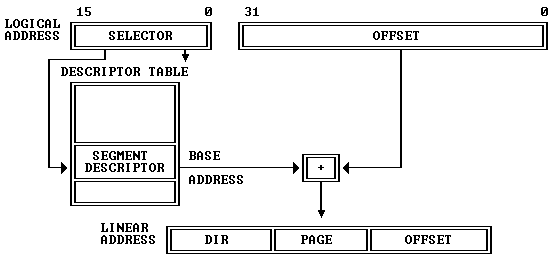
Segmentation is mandatory and active in both protected and real mode. The above illustration is easy to understand in protected mode: the segment base address is looked up from the in-memory GDT/LDT tables. What may not be obvious from the diagram is that the same segment calculation is also active in real mode, even when the linear address seemingly does not go through lookup tables. We'll talk about that below.
Why segmentation could have been expensive
The RD/DLY pattern above shows the contract between the microcode and the memory system: once a read is issued, the rest of the machine expects the address path to do its work quickly. A simple instruction boundary already shows how little slack there is.
Consider a pair of instructions like:
MOV AX, 123h
ADD [AX+45h], 2
Its microcode in execution order is:
; MOV r,i
005 IMM PASS RNI
006 SIGMA -> DSTREG
; ADD m,i
039 EFLAGS -> FLAGSB FLGSBA RD 9
03A DLY
03B OPR_R -> TMPB WRITE_RESULT JMP UNL
...
Line 006 writes the new value of AX. Instructions are executed back-to-back in the 386, so in the very next cycle line 039 wants to begin a memory read using that value as part of the effective address. That leaves almost no slack. The address hardware must react immediately at the instruction boundary.
This is where segmentation becomes a performance problem rather than just a correctness mechanism. If it were implemented naively, every access would need to fetch the segment descriptor, add the base, compare against the limit, and only then proceed. That would be hopelessly slow.
Cached segment state
The first optimization is simply to avoid repeating descriptor lookup on every access.
When a selector is loaded into a segment register, the processor also loads the descriptor's base, limit, and attributes into the register's invisible part. The hidden state (called descriptor caches) exists so the processor does not need to consult the descriptor tables on every memory reference. On the die photo, it actually occupies considerable space.
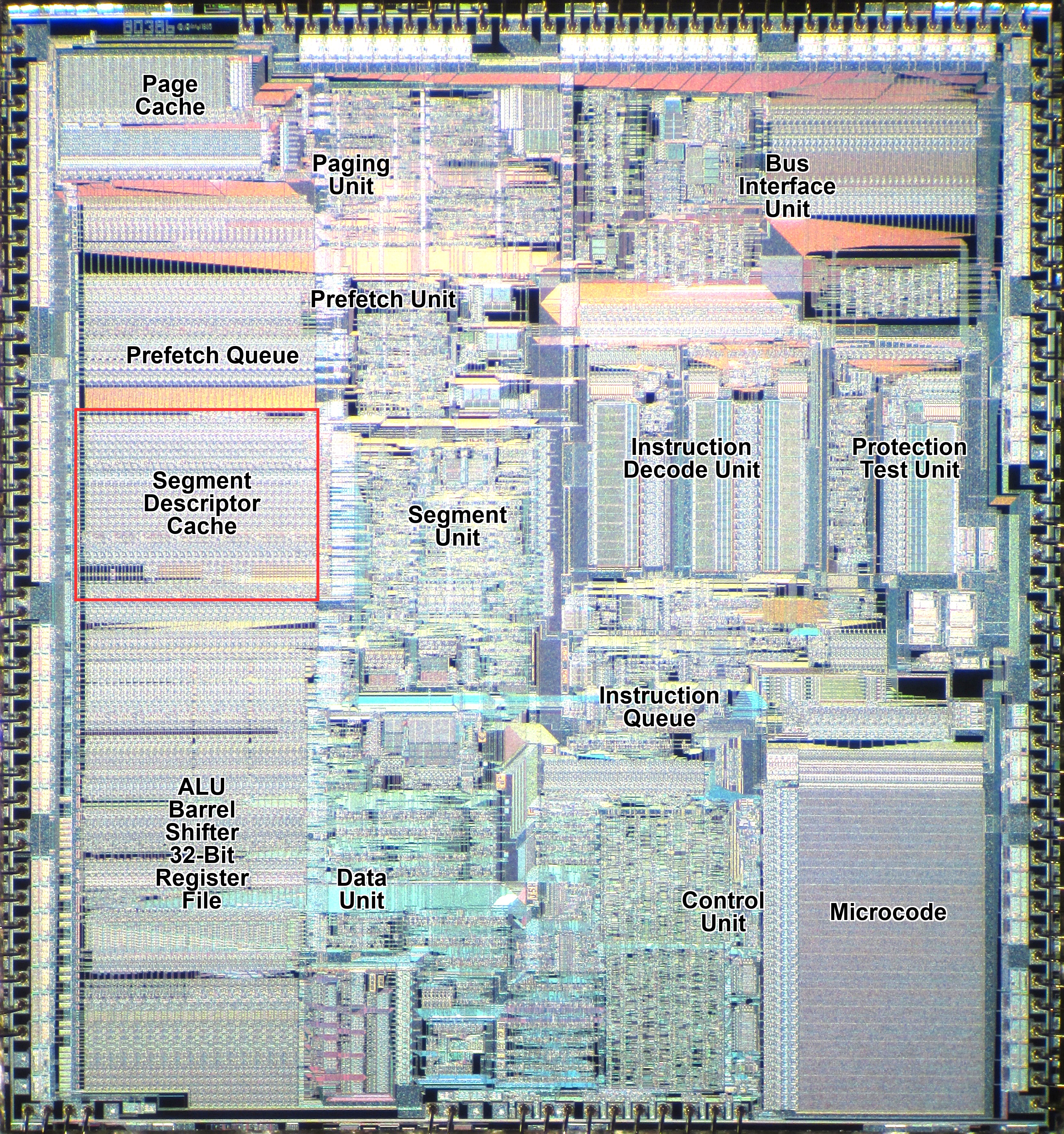
Base image: Intel 80386 DX die, Wikimedia Commons
{kind=link}
This is a crucial design choice. Without it, segmentation would either require extra memory accesses on every reference or a much more elaborate descriptor cache hierarchy. With it, ordinary accesses see segmentation as local state, not table-walking.
It also gives rise to a subtle but important architectural property: changing a descriptor in memory does not affect a segment register that already has that descriptor loaded. The cached copy remains in force until the selector is reloaded.
The descriptor caches also support real-mode address translation. Here is the microcode for real-mode and protected-mode MOV to a segment register:
; r MOV ES/SS/DS/FS/GS,rw
009 DSTREG DES_SR PASS RnI DLY SBRM 0
00A SIGMA -> SEGREG
; p MOV ES/DS/FS/GS,rw
580 DES_SR TST_DES_SIMPLE PTSAV1 DLY SPTR 0
581 LD_DESCRIPTOR LCALL
582 DSTREG -> SLCTR TST_SEL_NONSS PTSELE DLY
583 SLCTR2 -> SEGREG TMPC RNI SDEL
584 DLY
We actually talked about the protected-mode segment-loading microcode in the protection post. The LD_DESCRIPTOR routine does the heavy lifting and generically loads the descriptor into the corresponding segment descriptor cache. The interested reader is referred to that post for details.
For real mode, however, the microcode is very different. Line 009 uses a special operation SBRM (set-base-real-mode) to modify the base value in the hidden descriptor cache with the register (DSTREG) in the right segment (DES_SR), i.e. setting the corresponding base address to seg<<4. In this way, later processing of real-mode and protected-mode segmentation is unified into the same set of logic, reducing area and improving efficiency.
You may have noticed that the real-mode routine does not touch the limit value in the segment cache, which is supposed to be 64 KB in real mode. Nor is there any hardware that implicitly sets the limit; in fact, the limit is initialized only once when the processor boots. This interesting design choice by Intel is what makes the famous "unreal mode" trick possible. By entering protected mode, setting the limit to a large value, and returning to real mode, software can create a variant of real mode that allows access to a 4 GB data segment.
Parallel relocation and limit checking
Once the descriptor state is cached, the next problem is the actual arithmetic.
To form a linear address, the processor adds:
effective_address = base + index*scale + displacement
linear = segment_base + effective_address
At the same time, it must verify that the effective address is within the segment limit. The efficient way to do this is not to wait for the final linear address and compare that against some adjusted bound. The correct approach, which the 386 uses, is to compute linear address and conduct the limit check in parallel.
- one arithmetic path adds the segment base to the effective address
- another arithmetic path compares the last accessed byte offset against the segment limit
For the limit test, there are still more details: we actually need to check whether
offset + size - 1 <= limit
size is the byte length of the current operation. For example, for a dword access at 0x100, the last byte accessed is 0x103. A naive implementation here would need two full adders in series within the same cycle, one to compute the sum and one to compare the two sides. A better implementation is to compute something like:
limit - offset
And then use a small amount of shallow logic to determine whether the remaining space is enough for a byte, word, or dword. A single wide NOR gate could be used to check if the top 30 bits are all zero, and then a few more gates would be enough to check whether the lowest two bits are valid. This matches the kind of optimization described in Intel's address-translation discussion in the ICCD paper.
Why complex addressing modes cost an extra cycle
The 386 supports rich addressing modes:
EA = base + index*scale + displacement
First the scale factor (1, 2, 4 or 8) can be done with a fixed shift (4-way multiplexers) and is cheap. Then, if no more than two addition terms are present, the whole EA can be computed with a single full adder. However, if all three terms are present, we would need two full adders, again in series.
Intel designers again optimized for the common case here. If the effective-address hardware only has to add two 32-bit terms in the fast case, then EA is calculated in a single cycle. The occasional base + index*scale + displacement form can take an extra step rather than forcing every memory reference through deeper combinational logic.
Early start
One of the most interesting memory optimizations in the 80386 is Early Start. For some instructions, the address path does not wait for the new instruction to "start" in the usual microcoded sense. Instead, it begins address-related work in the last cycle of the previous instruction, overlapping that work with the previous instruction's writeback.
Our earlier example of MOV AX, 123h followed by ADD [AX+45h], 2 is exactly such a case. The execution order is:
; MOV r,i
005 IMM PASS RNI
006 SIGMA -> DSTREG
; ADD m,i
039 EFLAGS -> FLAGSB FLGSBA RD 9
03A DLY
...
In the second cycle, at microcode address 006, the result of the MOV instruction (0x123) is written into AX. That same cycle is also the hardwired early-start window for the following ADD. During that cycle, the address path peeks ahead, sees that the next instruction needs AX+45h, and uses the just-produced value of AX through bypass logic to generate the effective address:
EA = 0x123 + 0x45 = 0x158
By the time the ADD instruction officially begins in the third cycle, the memory read for the operand at [AX+45h] is already underway on the external bus.
Without early start, the ADD would have had to wait until cycle 3 just to begin reading AX and computing the address. By overlapping these hardwired functions with the final cycle of the MOV, the 80386 effectively hides much of the 1.5-to-2-cycle address-generation latency, allowing the microcode to begin processing the fetched data as soon as it arrives.
Slager reports in the same ICCD paper that early start improves overall performance by about 9%. The benefit shows up clearly in the timing of common memory instructions with no wait states:
| Instruction class | Typical clocks |
|---|---|
| Store | 2 |
| Push register | 2 |
| Load | 4 |
| Pop | 4 |
Unfortunately, early start also introduced some real complexity, and that complexity appears to be behind at least one production 80386 bug: the POPAD bug. The bug exists in all Intel 80386DX steppings.
At the end of POPAD, the new value for EAX is committed through a mechanism called IRF (Indirect access to Register File). If the next instruction immediately uses a complex addressing mode such as [EAX+4], the forwarding logic does not handle this case correctly. In other words, the exact optimization that usually makes the machine faster also creates a corner case where the "peek ahead" machinery sees the wrong value.
That is a useful reminder that optimizations like early start were hard to get right, precisely because they introduced so many corner cases.
Paging fast path
Paging is the other obvious place where the 386 could have become slow. Without a TLB, every memory access would need extra table lookups before the real work could even begin.
I covered the paging mechanism itself, including the hardware page walker, in much more detail in the protection post, so I will keep this section short. The main point here is simply that paging is part of the fast path too. On a TLB hit, translation stays cheap enough to fit into the same overlapped memory pipeline. On a miss, the hardware page walker takes over and does the expensive work without turning it into a large microcode routine.
Bus interface and caching
To finish our memory-pipeline discussion, we need to talk about the bus interface unit and caches. The 80386, like the 80286 but unlike the 8086, uses a non-multiplexed address/data bus. That avoids the dead time that a multiplexed bus would need to switch directions between address and data phases. If the system memory can keep up, a bus cycle is only two clocks: an address phase and a data phase. It also allows address pipelining: while one bus cycle is finishing, the address for the next cycle can already be presented. In effect, this gives the memory system an extra cycle to respond without immediately slowing down the processor.
In practice, system DRAM in that era was usually slower than that ideal. Typical DRAM latency was about 80 ns to 130 ns, which already corresponds to two or more CPU cycles. So two clocks are the best-case bus cycle, and anything slower shows up as wait states where the processor is simply waiting for the external memory system.
The other important point is arbitration. Prefetch and data cycles ultimately compete for the same external bus, but Intel's design gives priority to real data cycles and lets prefetch fill the gaps. In the ideal zero-wait-state case, this means much of the contention can be hidden: data cycles go first, and instruction fetch uses the slack between them. Even so, the basic constraint remains the same: code fetch, data access, and paging all share the same memory path.
This is where the cache comes into play. The 386 has no on-chip cache, but it is the first x86 processor designed with cache very much in mind. The Intel 82385 companion chip is a dedicated cache controller designed to sit between the processor, an SRAM cache, and main memory. On a cache hit, it provides the CPU with a no-wait-state, 2-clock bus cycle. On misses, it forwards accesses to main memory and refills the cache lines. The cache, typically 64 KB to 128 KB in higher-end systems, turns out to be very effective: it is common for a 386 with cache to be 30% to 40% faster than one without.
Putting it together
Seen as a whole, the memory pipeline looks something like this:
- microcode issues
RDorWR - effective address hardware begins work, sometimes with an early start
- segmentation relocates and checks in parallel
- the TLB translates the linear address on a hit
- the bus interface schedules the access while prefetch competes in the background
- the result returns in time for the microcode's
DLYsynchronization point

RD memory read through the 80386 memory pipeline, showing the early-start caseMapping the memory pipeline to an FPGA 386
We have been mostly focused on the historical 386 in this series so far. Here I want to begin discussing how that memory-pipeline model maps onto the FPGA 386 core I've been building. It uses SDRAM, like the ao486 core, and relies on caching to reduce memory-access latency.
There are a few points worth discussing when mapping the historical 386 memory pipeline to modern FPGAs, mostly around asynchronous vs. synchronous logic and memory. The overall goal is to map the microarchitecture relatively faithfully while still achieving high Fmax and low CPI.
Latches vs. registers. The 80386 (and 486) are primarily latch-based designs; see Ken Shirriff's article Inside the Intel 386 processor die: the clock circuit for a die-level view of the 386 clocking scheme. Latches are level-triggered and their output follows the input as long as the enable signal is high. In contrast, modern flip-flops are edge-triggered and take snapshots of the input at clock edges. Compared with flip-flops (registers), latches require fewer transistors and allow "time borrowing" (a slightly slower phase can borrow time from a neighboring faster phase). So dividing work evenly matters more in the FPGA design. I experimented quite a bit with where to insert registers, and different decisions led to different Fmax values. In the end I landed on the pipeline design presented in the previous section and it works fine.
Two clock phases. The 386 also has two clock phases per clock cycle. That is why the address-translation latency is quoted as 1.5 cycles. One way to emulate this in an FPGA would be to double the clock speed and use one FPGA clock cycle as a phase. I did not do that; I simply made address translation 2 cycles. That could mean slightly more latency and some CPI impact here, but I have found no good way to verify it.
Cache design. One of the common challenges in implementing caches on an FPGA is that block RAMs are synchronous: the value is only available one cycle later. That is why an FPGA-based cache typically takes two cycles, one for tag lookup and one for data retrieval. To implement an 82385-style cache and achieve zero wait state, address pipelining is basically mandatory, because that leaves exactly two cycles for the cache to return data. I have not implemented address pipelining yet, so an L2 cache would incur a wait state here. That is why I decided to do L1 cache instead: a 16 KB instruction cache and a 16 KB data cache sit inside the CPU and provide one-cycle hit latency, faster than the external 82385 cache, although smaller in size.
Conclusion
The 80386 memory pipeline is a carefully engineered combination of latency-hiding techniques spanning microcode, segmentation, the TLB, the bus interface, prefetch, and external caching. The result is a processor where protected virtual memory usually performs much closer to physical memory than the architectural diagrams alone would suggest, and slows down mainly in the less common cases.
That, more than paging alone, is what made the 386 a practical foundation for serious PC operating systems. There are still some topics to cover, like instruction prefetching and decoding, task switching and interrupts. Now that the core is already running DOS and games, I expect to start talking about those topics, along with the actual implementation, next time.
Thanks for reading. You can follow me on X (@nand2mario) for updates, or use RSS.
Credits: This analysis of the 80386 draws on the microcode disassembly and silicon reverse engineering work of reenigne, gloriouscow, smartest blob, and Ken Shirriff.
Comments